买了伟力K120,翻出几年未用的18sz,飞了几天,挺好飞的,不错,准备这个冬季用它恢复陀螺仪的手感。
这两天突然有了个邪念,这小玩意能不能也用开源飞控改成可以自动飞行的小直升机呢?其实就是给自己找个挑战,满足一下好奇心和实践这些东西搭配的可能性。
于是就到处翻规格和硬件配置适合的开源飞控,找了好多,不是太大,就是设计只适合穿越机,而不适合直升机。

突然有一天,有位业内认识向我推荐了一款飞控,在配置、规格、体积方面都非常接近K120原厂接收板的飞控——Holybro KakuteF7 mini


产品数据:
- MCU: STM32F745VGH6 32-bit processor,216MHz, 320Kbytes RAM, 1Mbytes Flash
- IMU: ICM20689 (SPI)
- Barometer: BMP280
- USB VCP Driver (all UARTs usable simultaneously; USB does not take up a UART)
- 5.5 hardware UARTS (UART1,2,3,4,6,7)
- Supports serial receivers (SBUS, iBus, Spektrum, Crossfire) only. PPM and PWM receivers are not supported.
- Onbord 16Mbytes for Blackbox logging
- 5V Power Out: 1.0A max
- 3.3V Power Out: 0.2A max
- Dimensions: 33x26x6mm
- Mounting Holes: Standard 20mm square to center of holes
- Weight: 4g
已经是能找到的最适合的开源飞控了,而且重要的是,有ArduPilot最新固件的支持,这个非常重要!
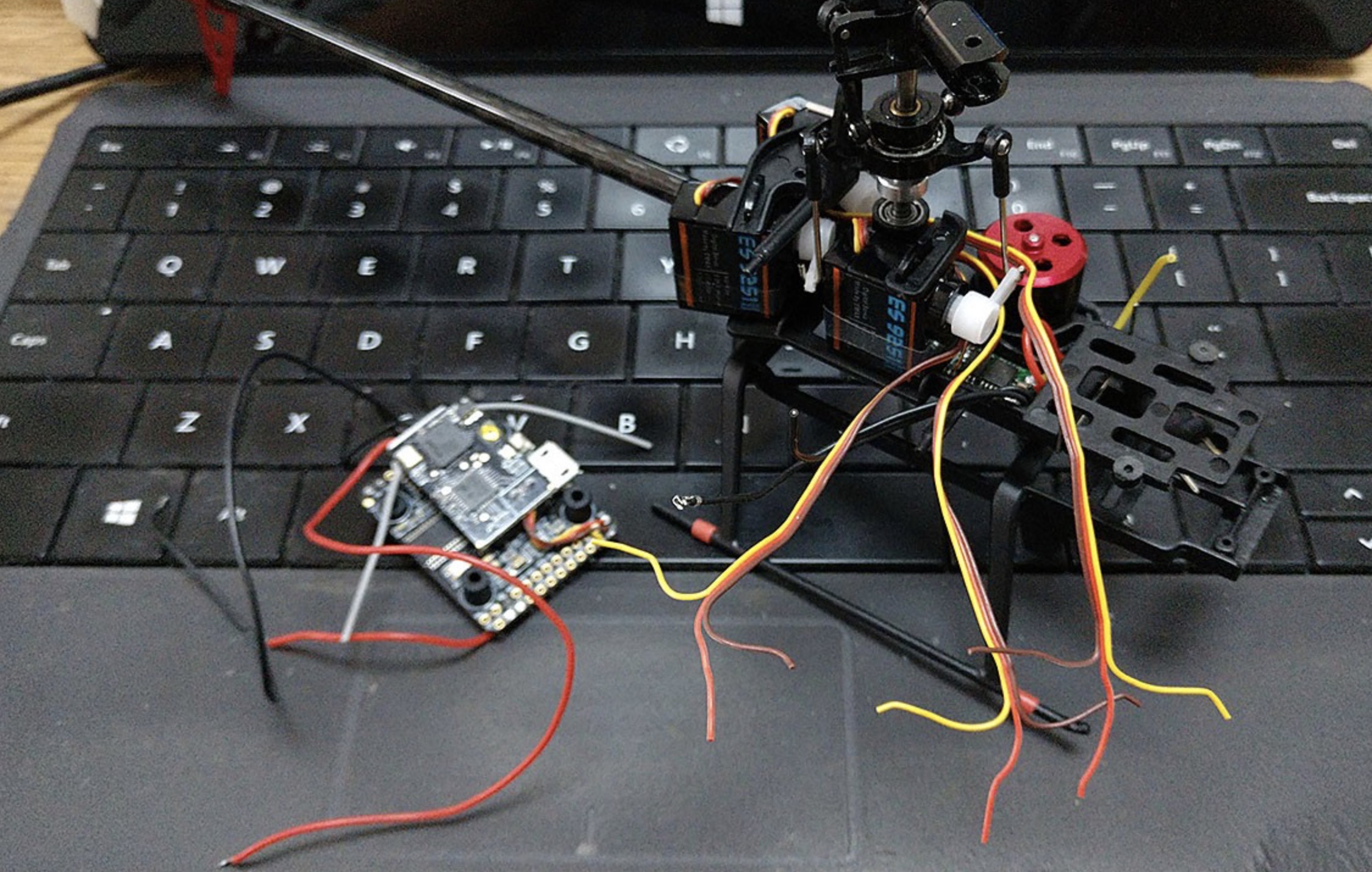
于是,就开始筹划这件事,先在脑子里过一遍需要的东西和他们的搭配组合,需要mini接收机、需要带bec的电调、需要给尾空心杯电机驱动的有刷电调,然后,就开始按步骤采购。
接收机最先收到,FT4X,支持FASSt制式,也就是兼容T8FGs,因为我用T8FGs飞开源飞控的比较熟悉,设置都相同,就没选择S-FHSS制式的接收机,FT4X外观和DSM的卫星一样,去壳之后,体积可以接受,对频顺利,支持sbus,方便接飞控。

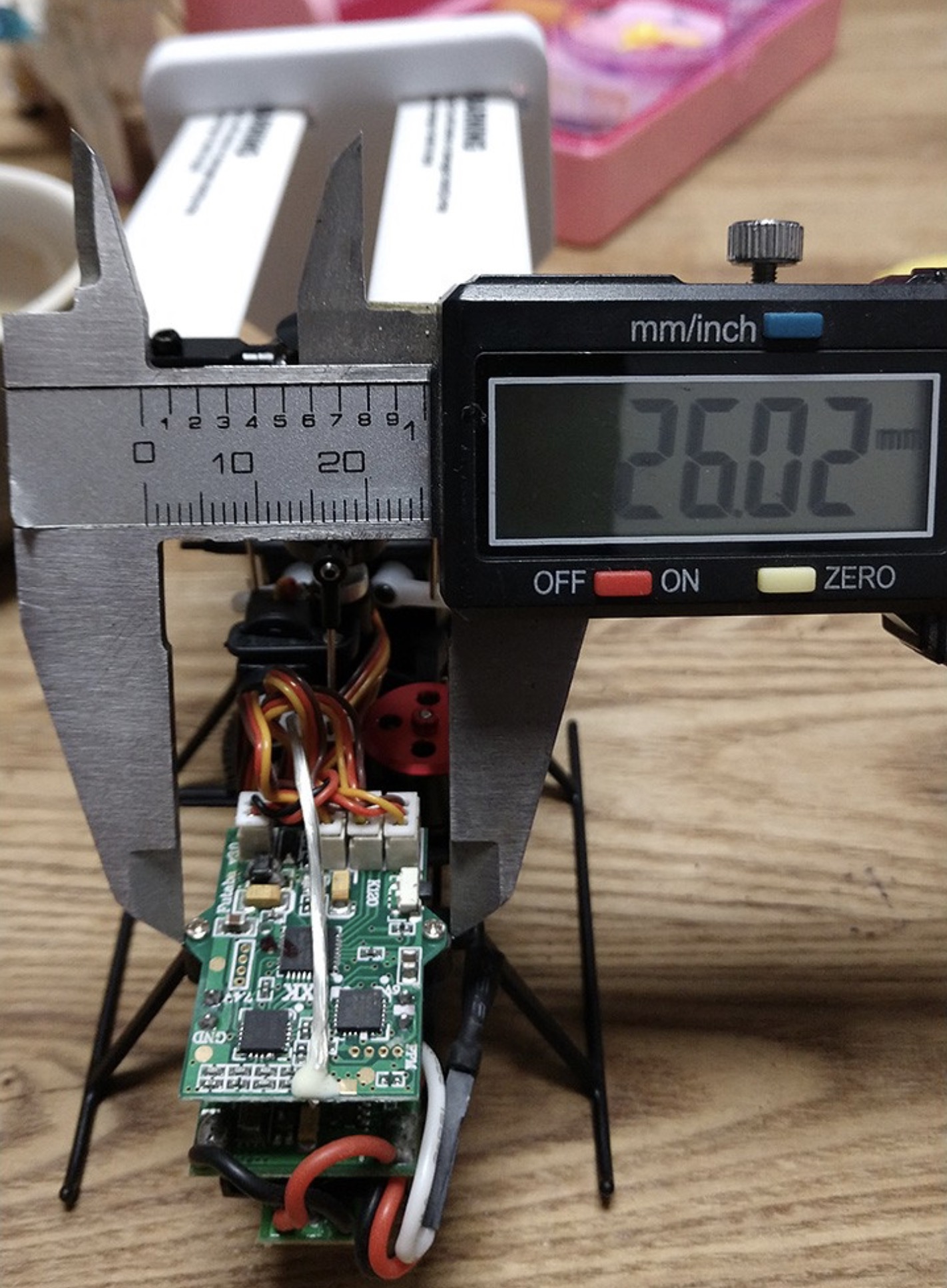
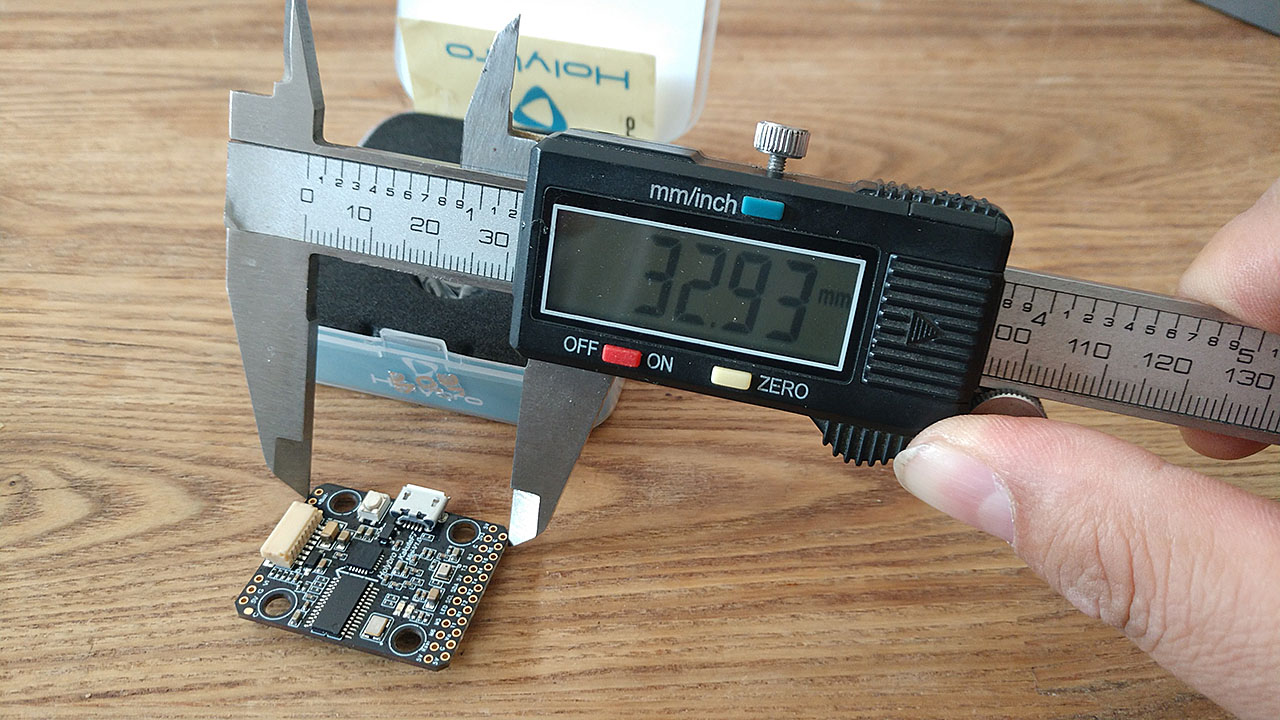
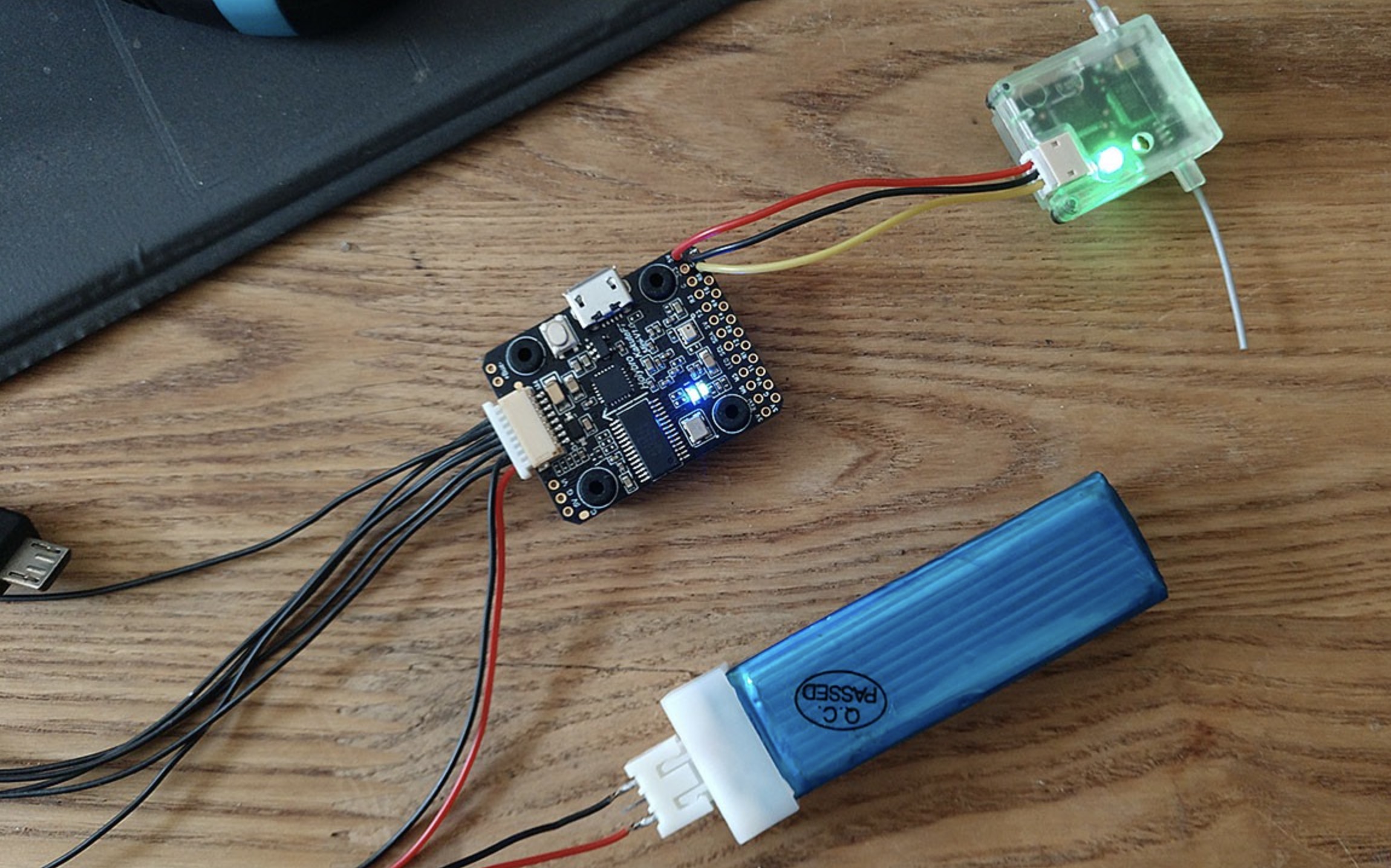
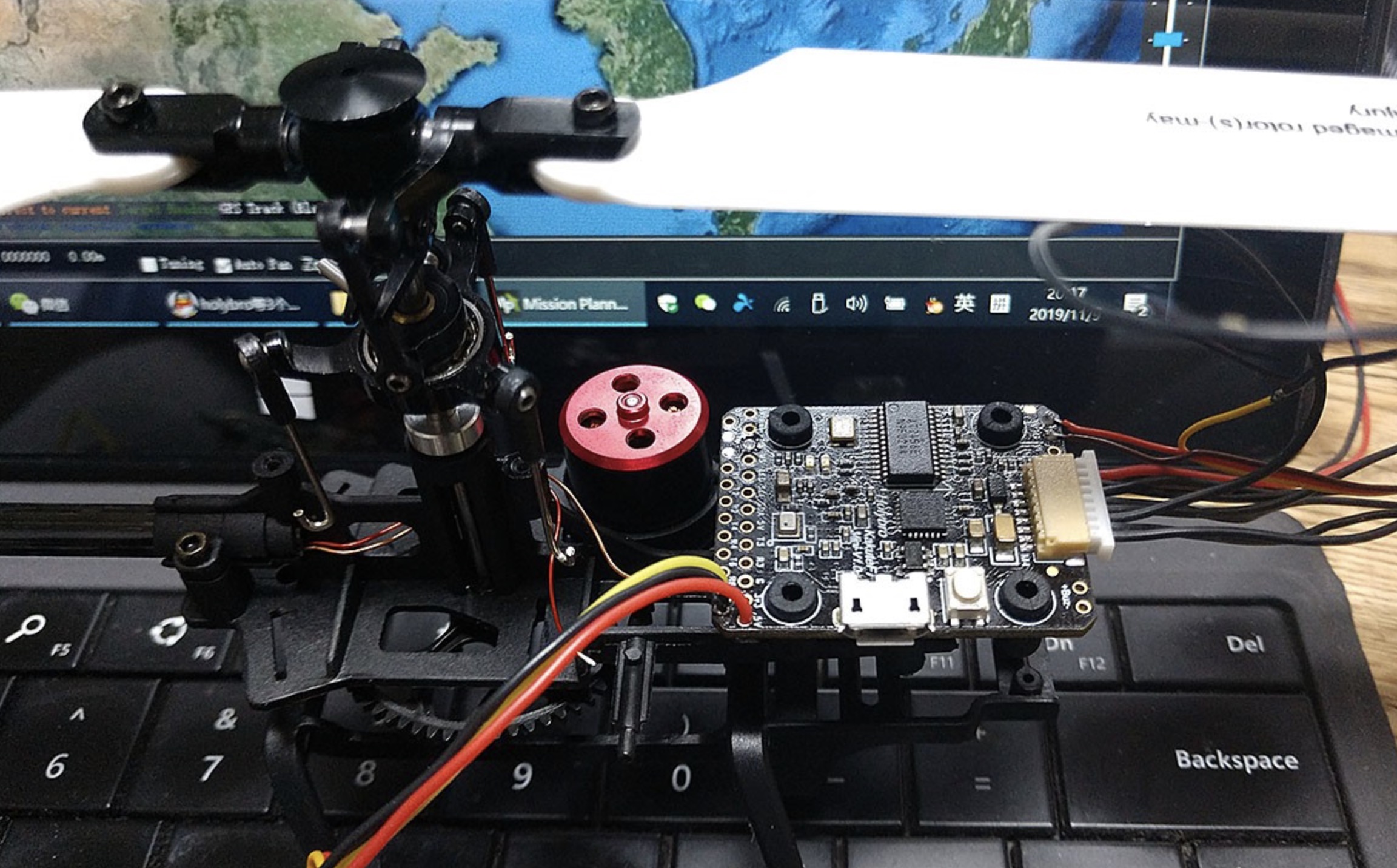
飞控也到了,赶紧用卡尺测量外观规格


与K120原接收陀螺尾有刷电调一体主板比较,稍稍大了一点点,满意。

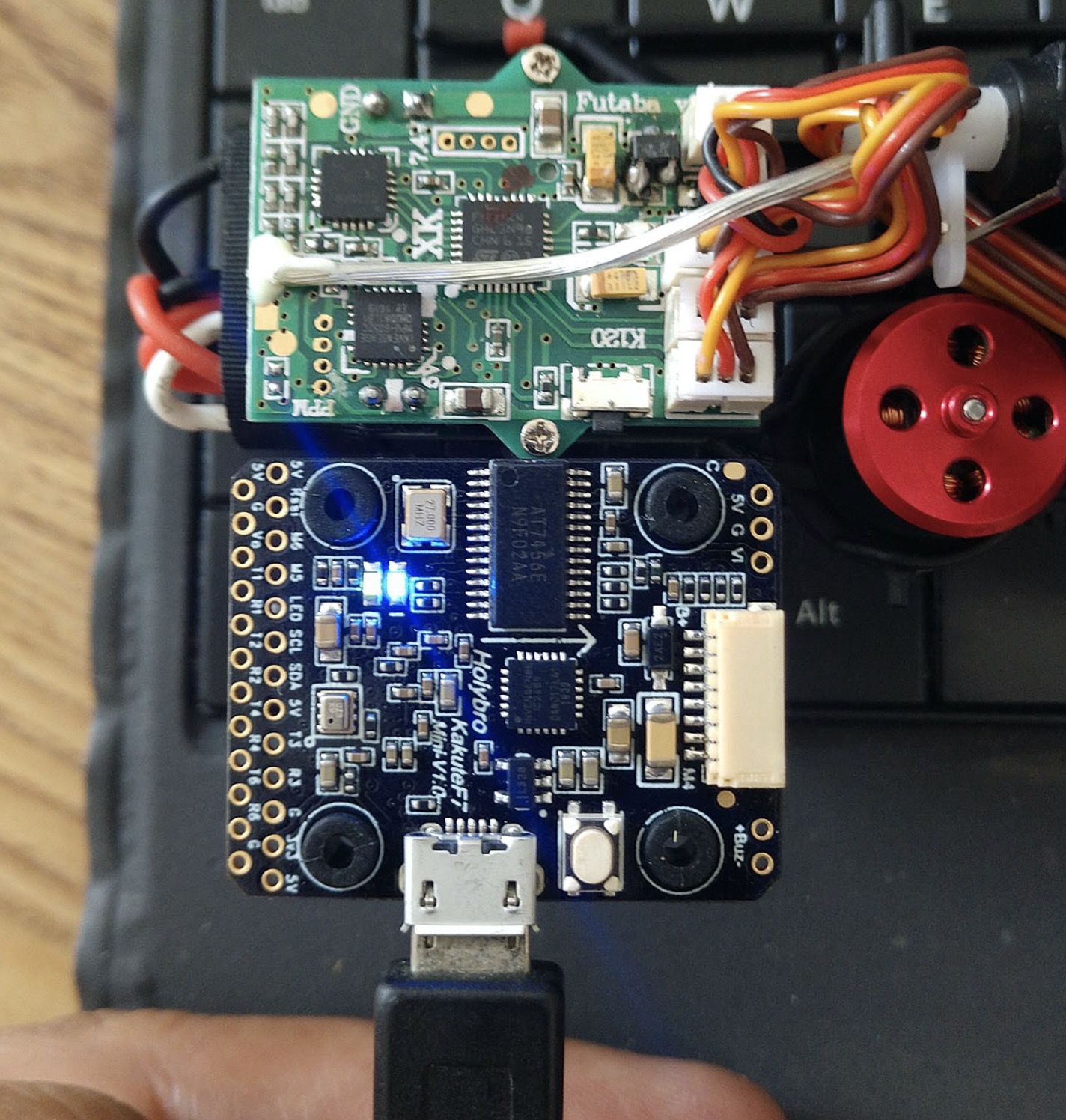
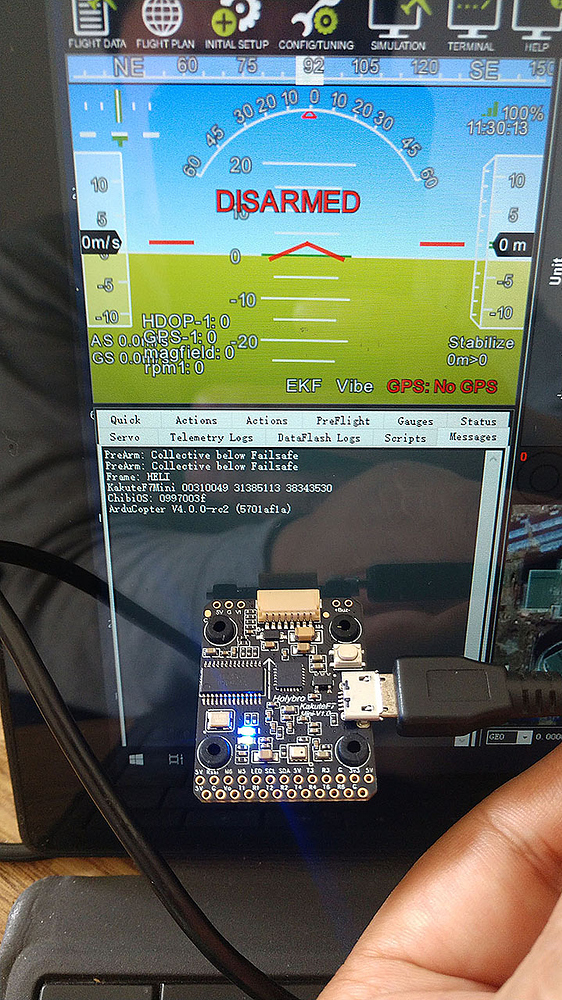
刷入支持的固件,校准各个传感器,一切顺利。
连接接收机,校准遥控器各通道

接上主供电,飞控支持2-6s,K120是2s动力,这给K120装飞控提供了可能性,不然1s的K110就麻烦了。
迷你固定翼所用的有刷电调也到了,1s供电,用它来驱动空心杯尾马达。
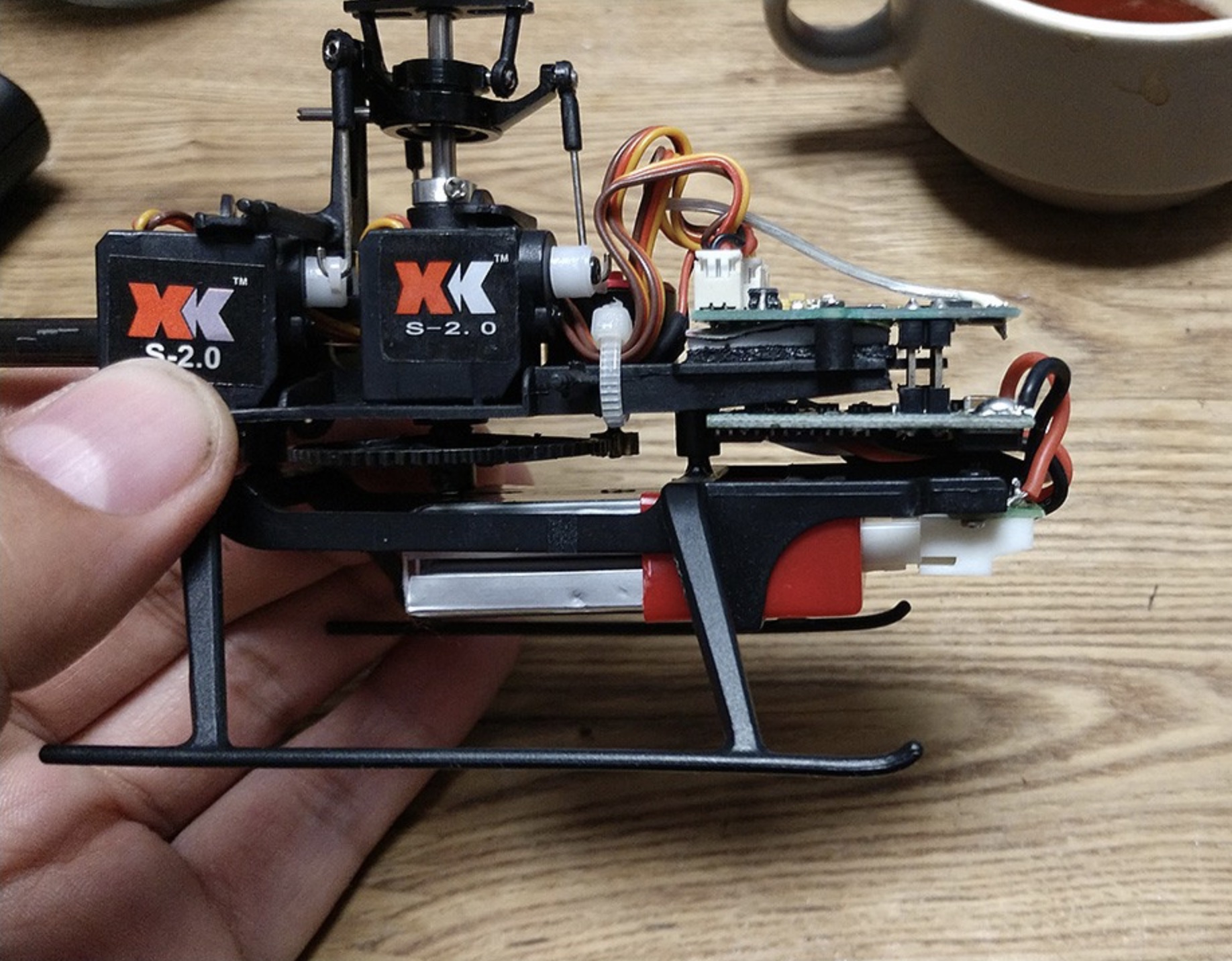
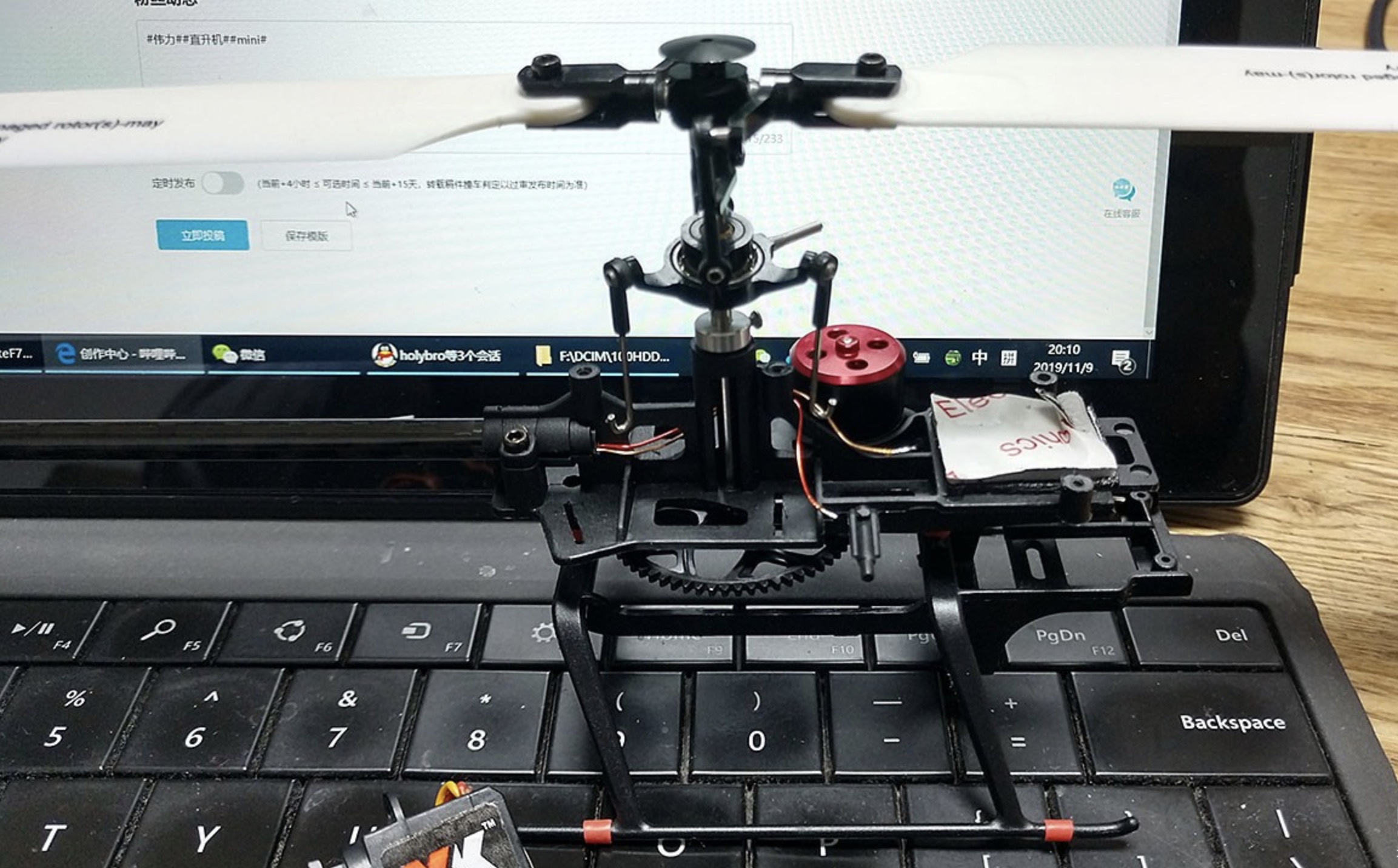
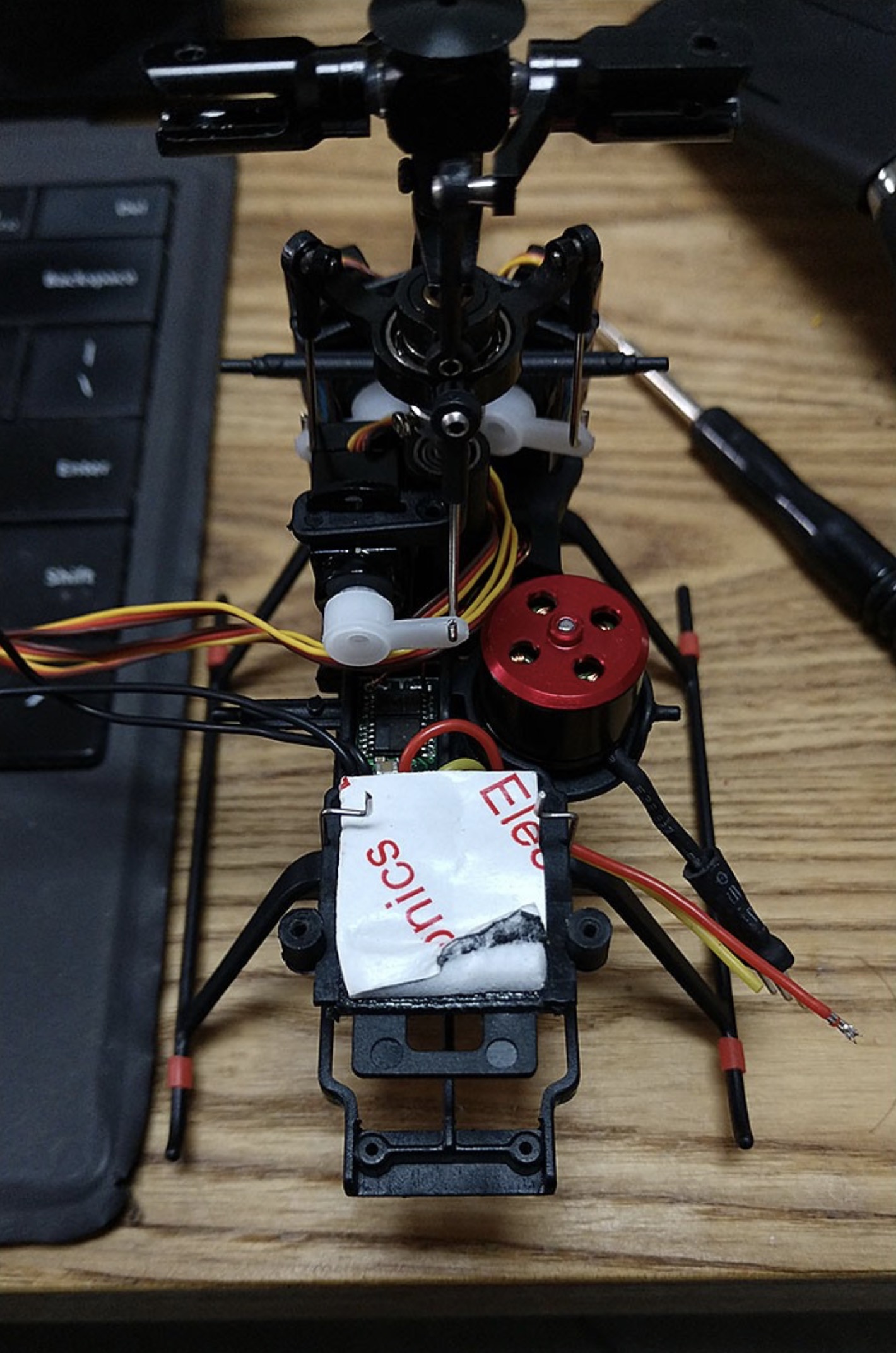
开始拆掉K120原配的主控板和舵机
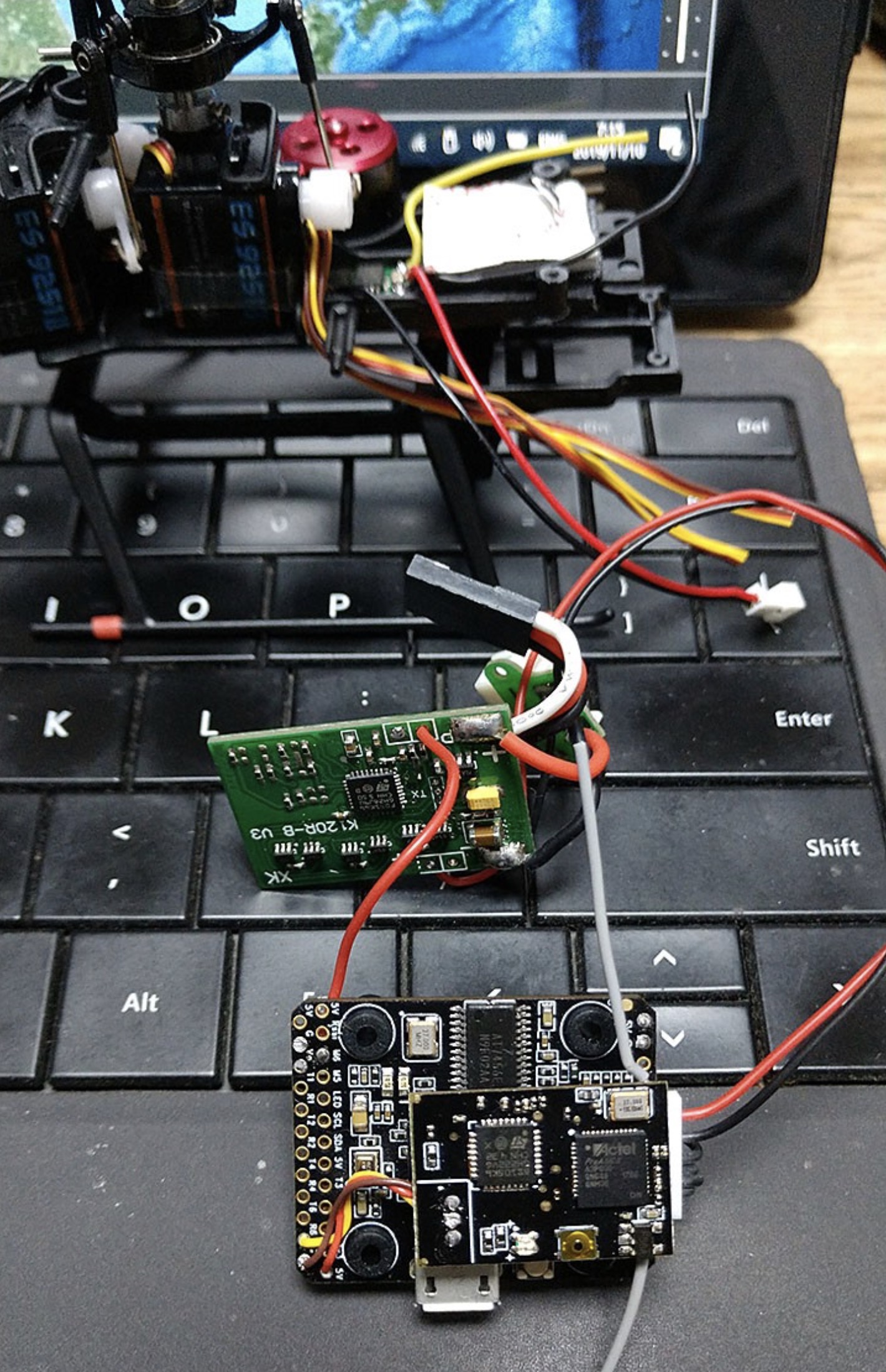
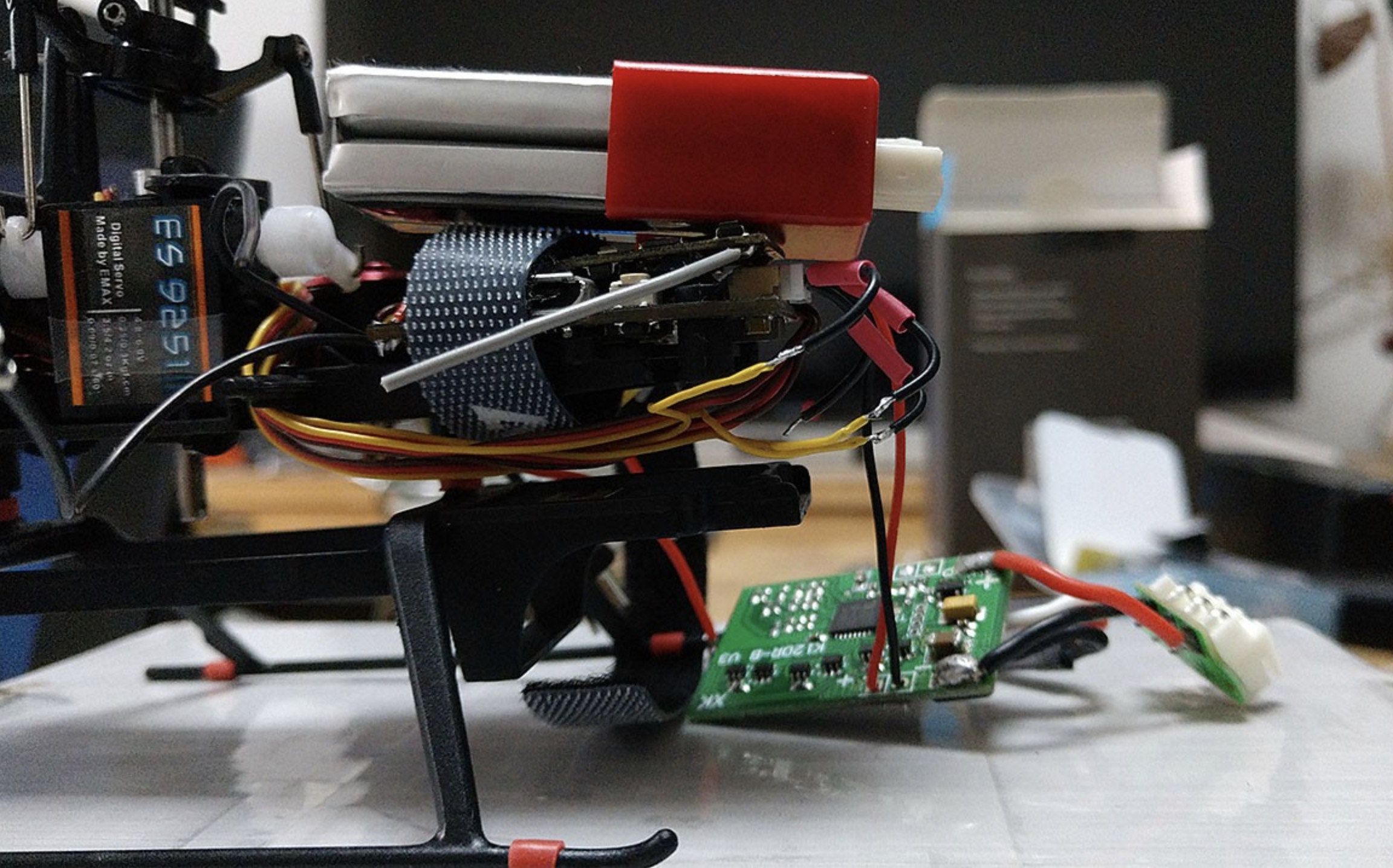
将电调与主板分离,再根据本版诸多玩K120的XD们提供的信息,知道了电调的供电、信号线、Bec接口

开始一个一个的考虑怎么布置
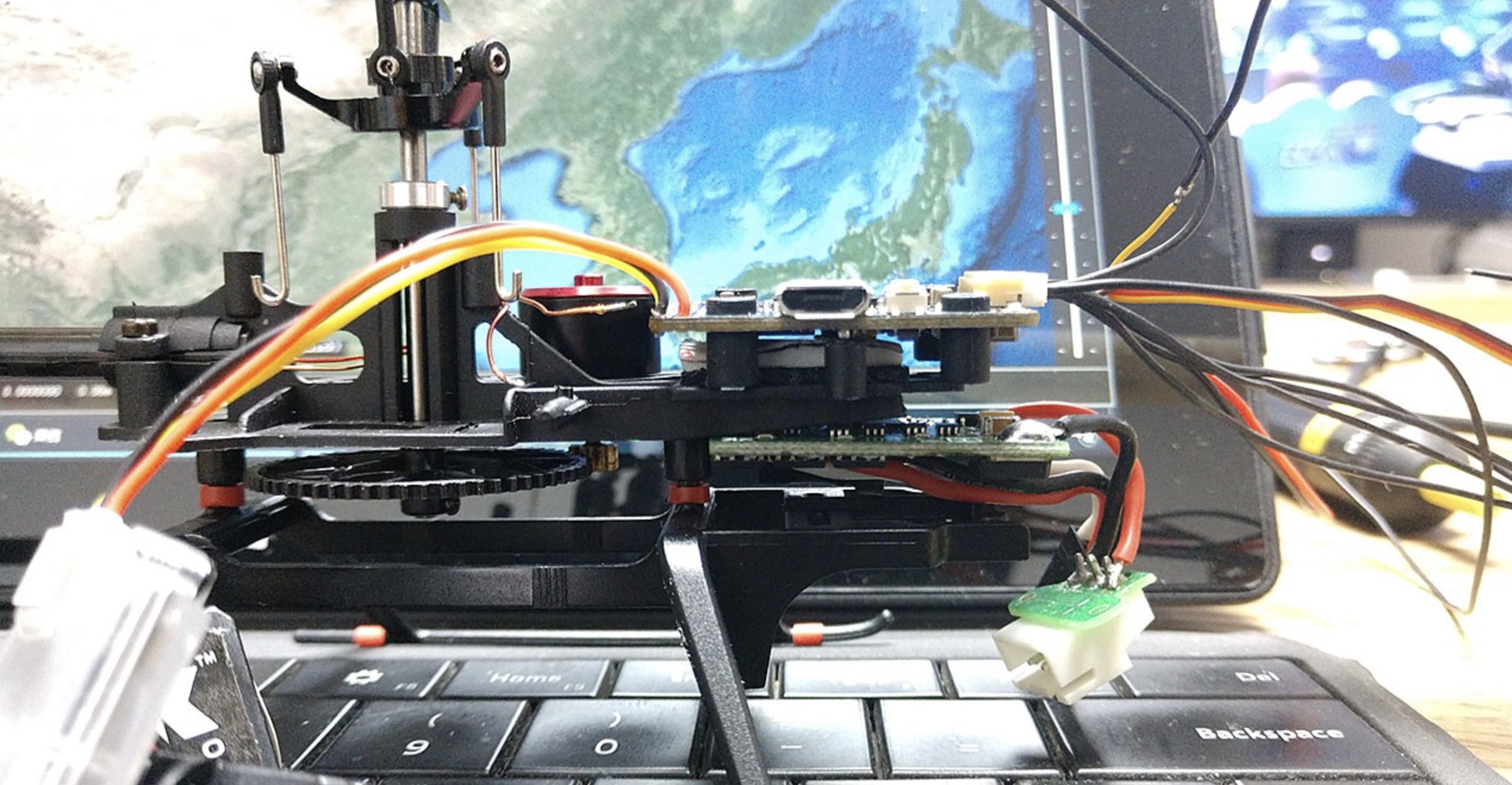
找到飞控的主无刷电调的信号接口

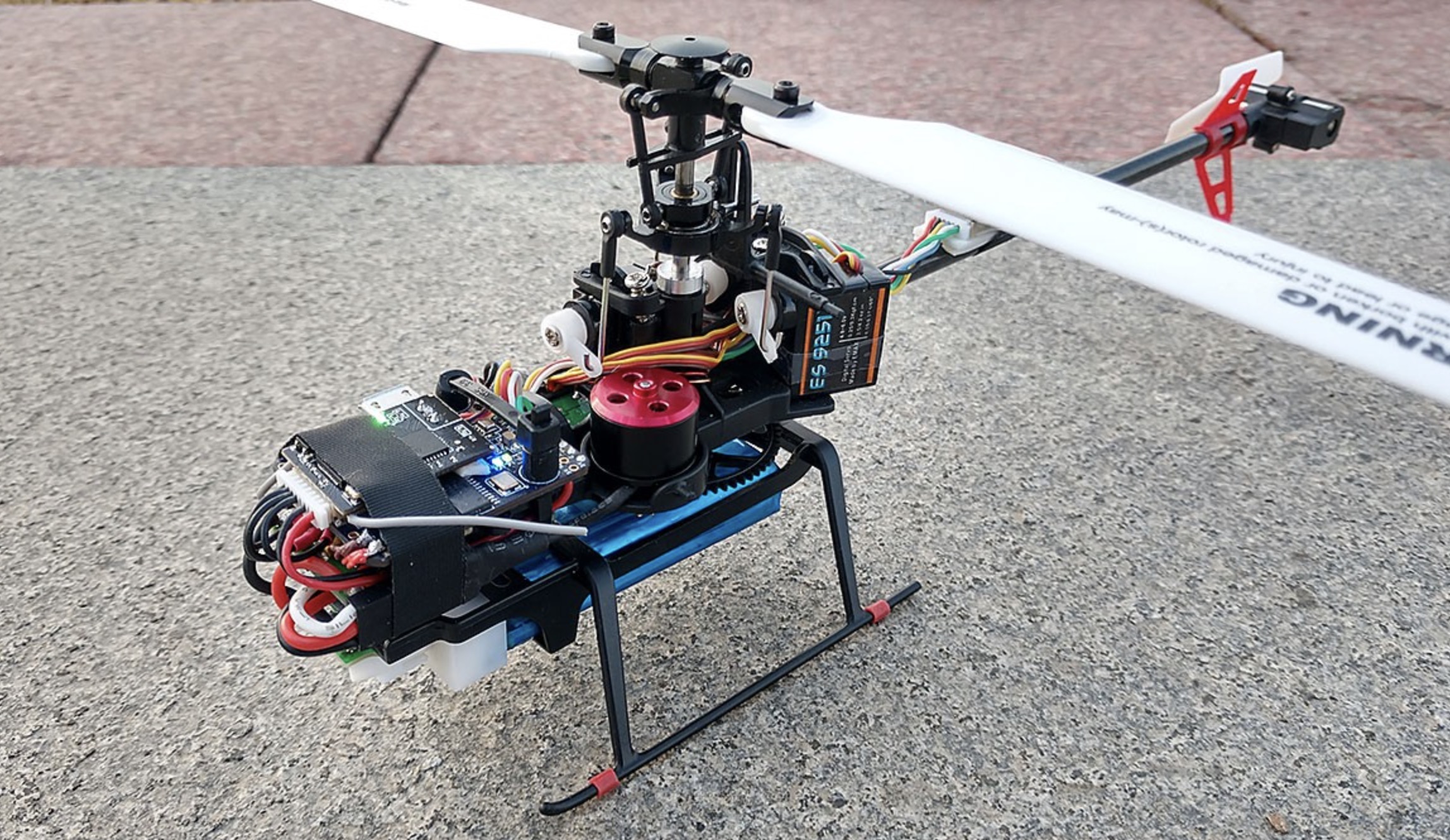
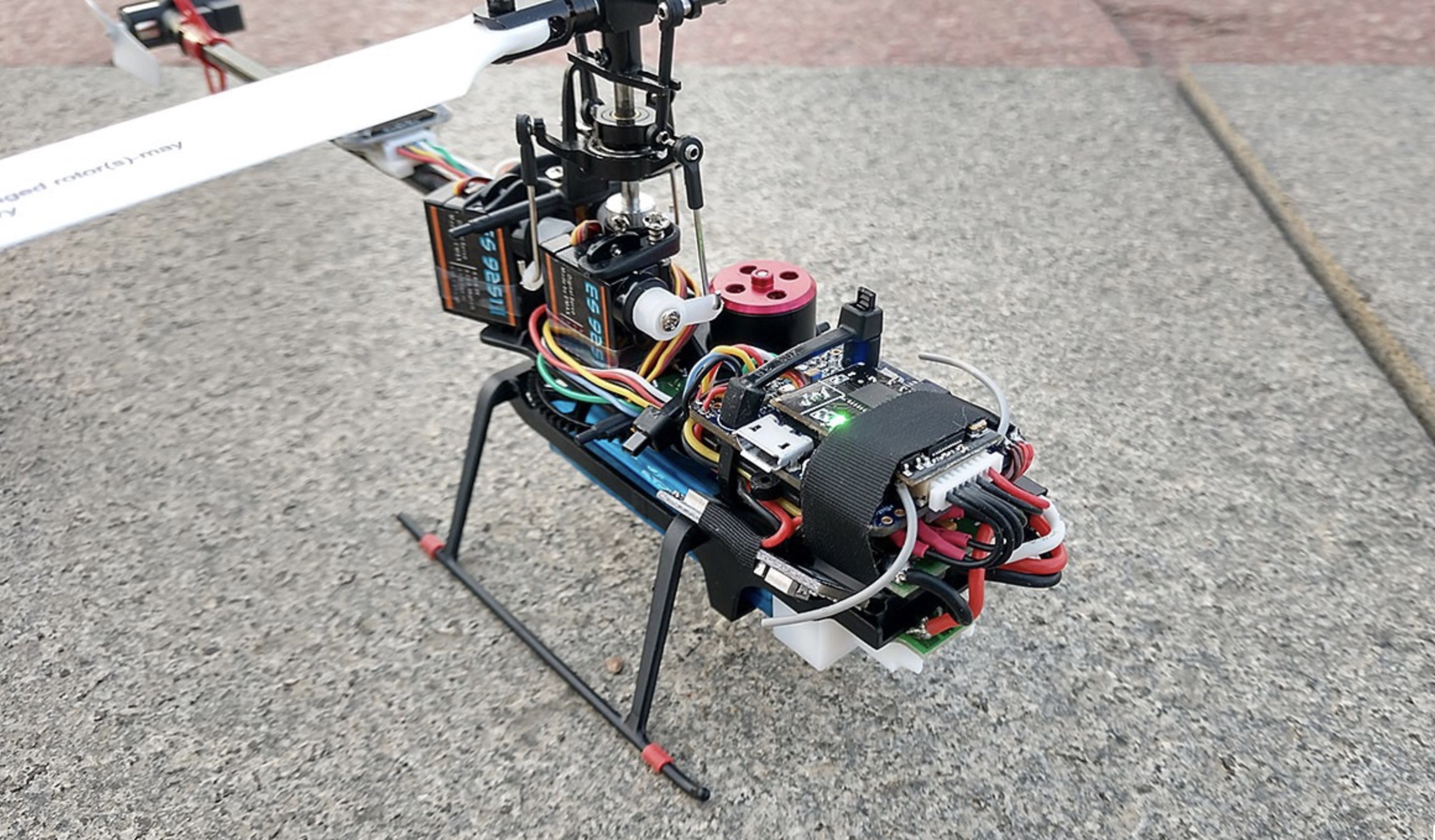
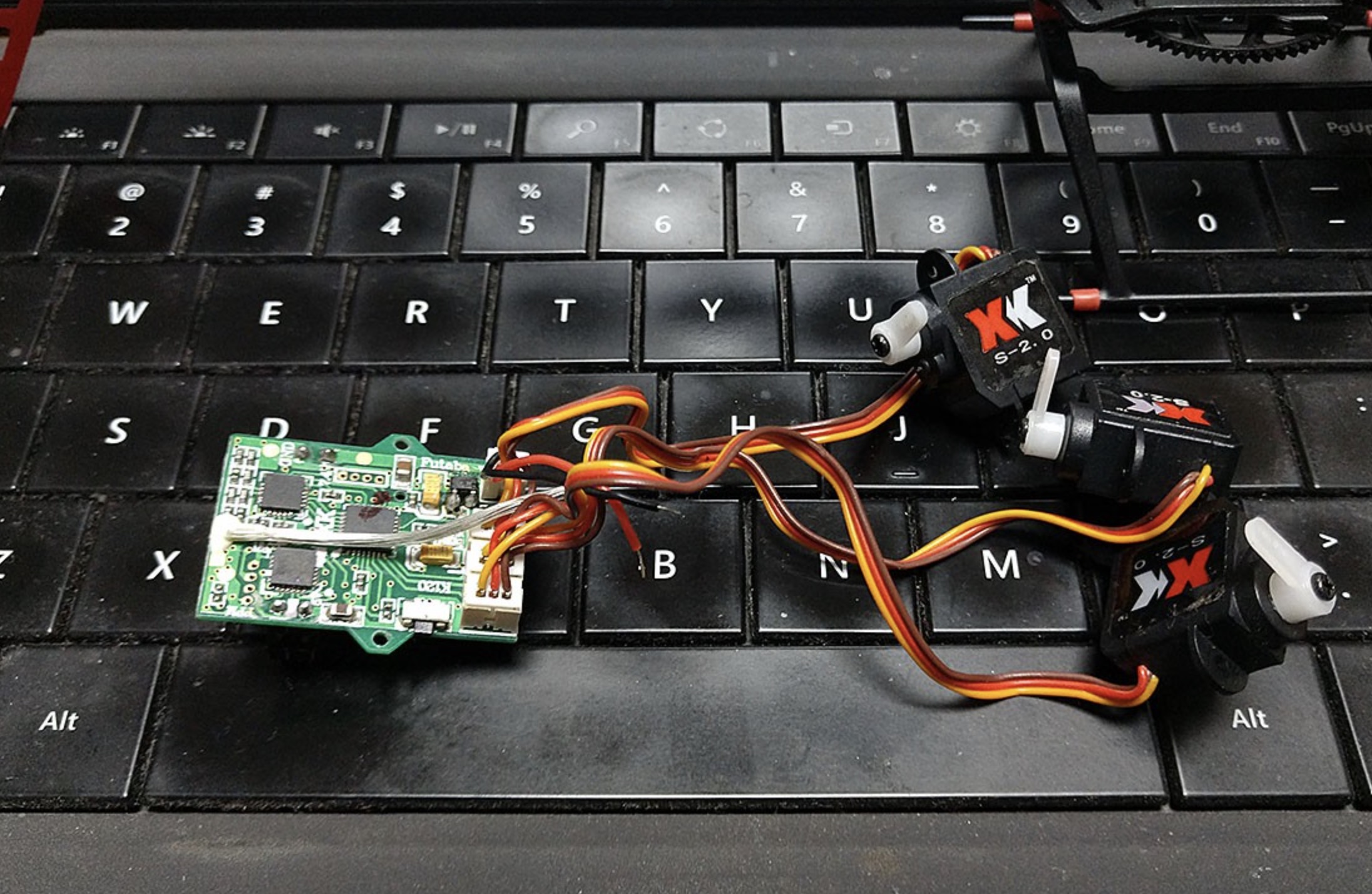
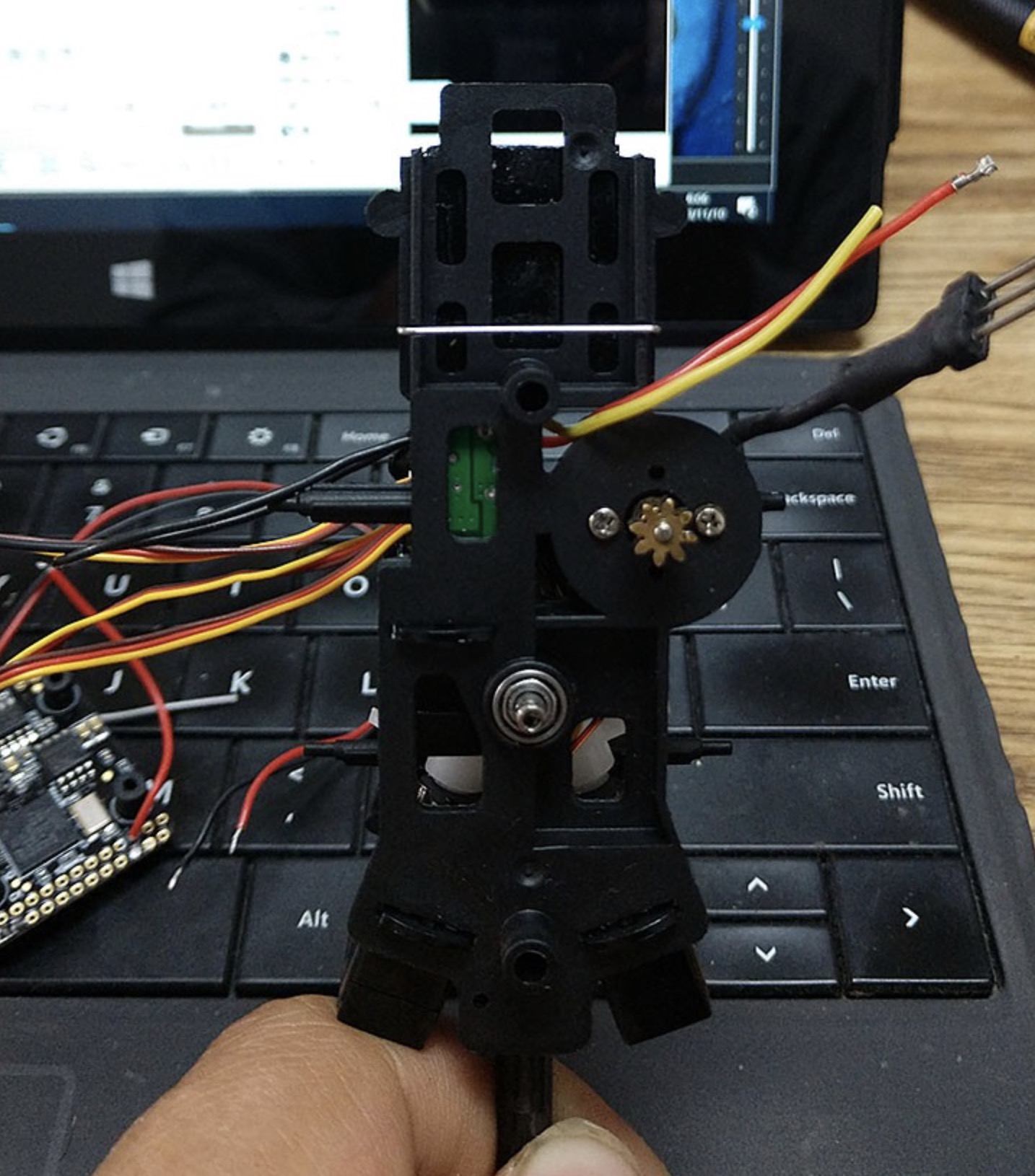
换上了3个银燕的9251 II数字舵机,比K120原舵机稍稍高了一点
要考虑好走线,因为线会很多
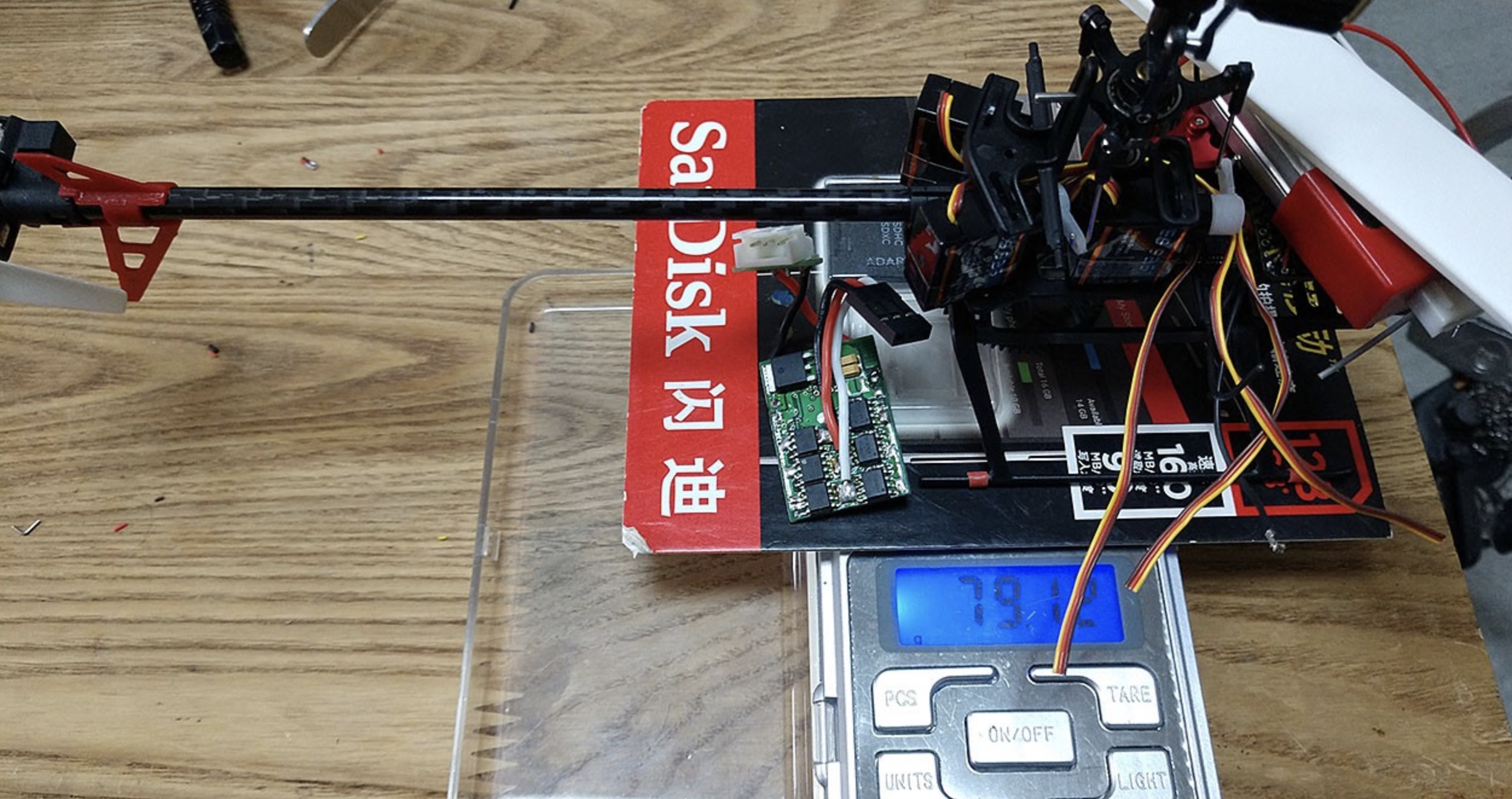
估算一下总的起飞重量
开始焊接舵机连线,尽量减重,把接受的插座插头都扔掉,直接用剪下来的舵机线焊接

焊线,并做好绝缘保护

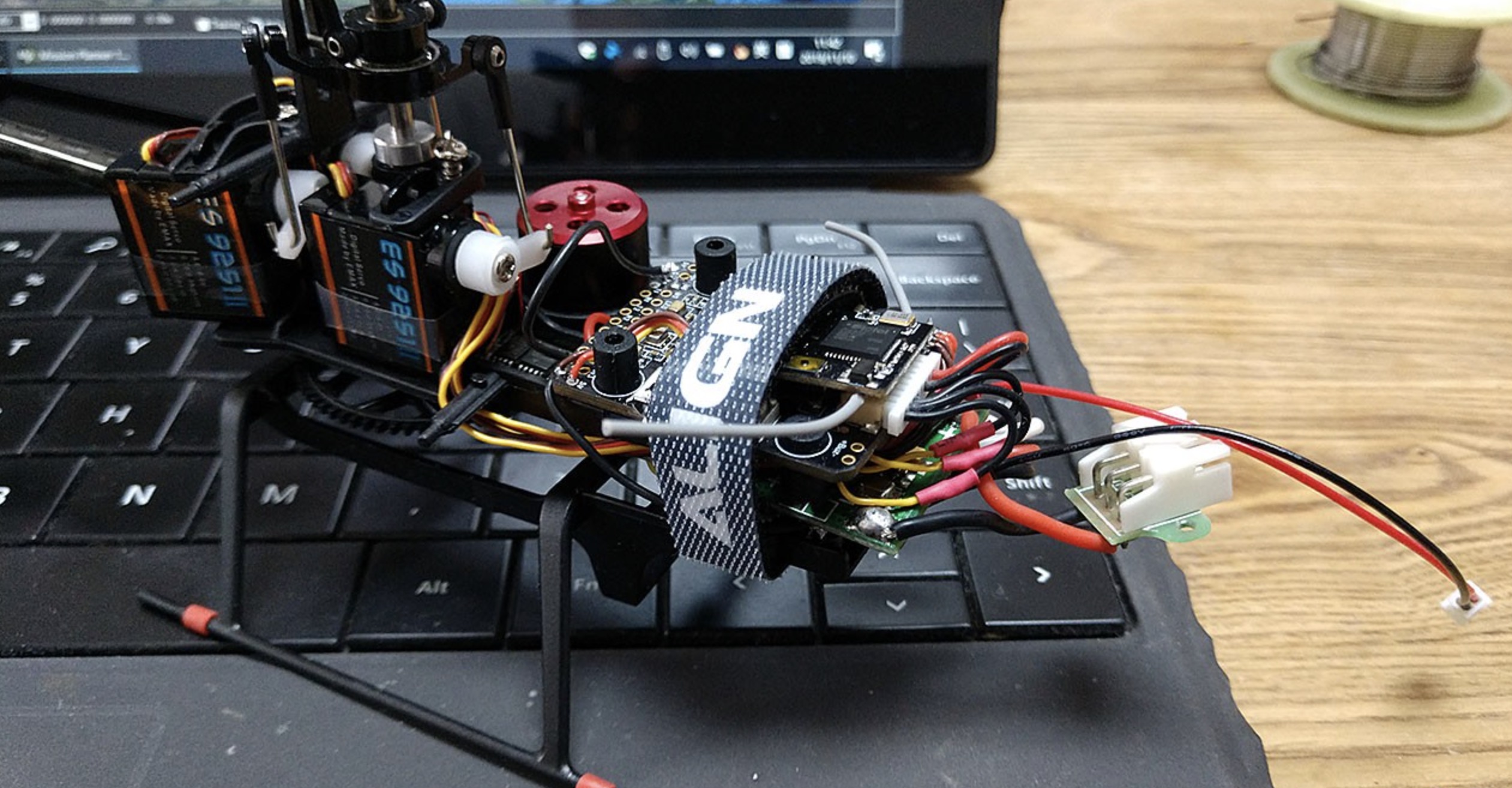

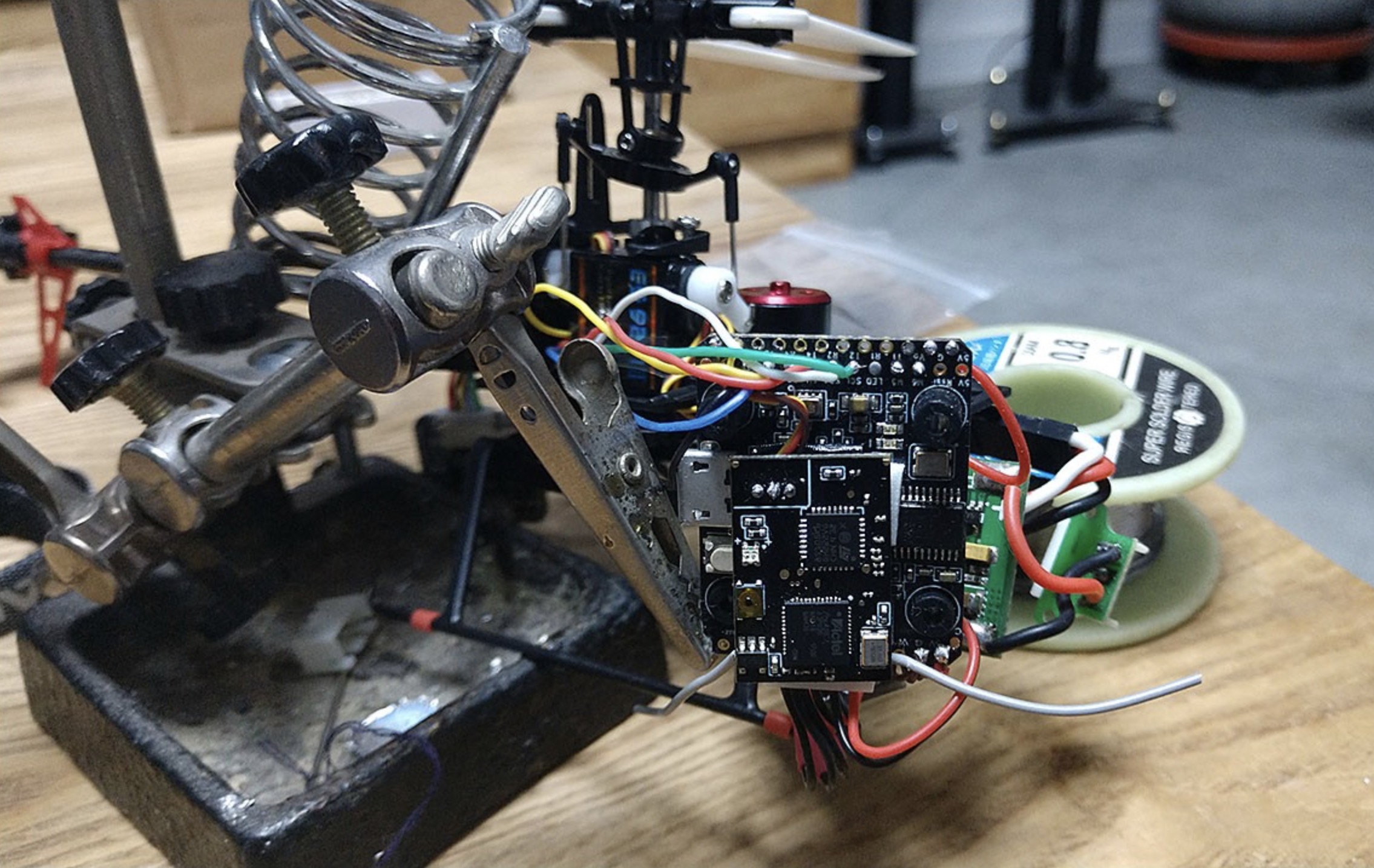
有点模样了,可以尝试启动了
第一个问题来了Bec供电不足,尾有刷电调接K120原电调Bec,解锁推油门,电调就重启,换做接到飞控的+5V上,推油门,飞控就重启,bec带不动,如果把有刷电调的供电引出来,直接插1s电池,就可以。
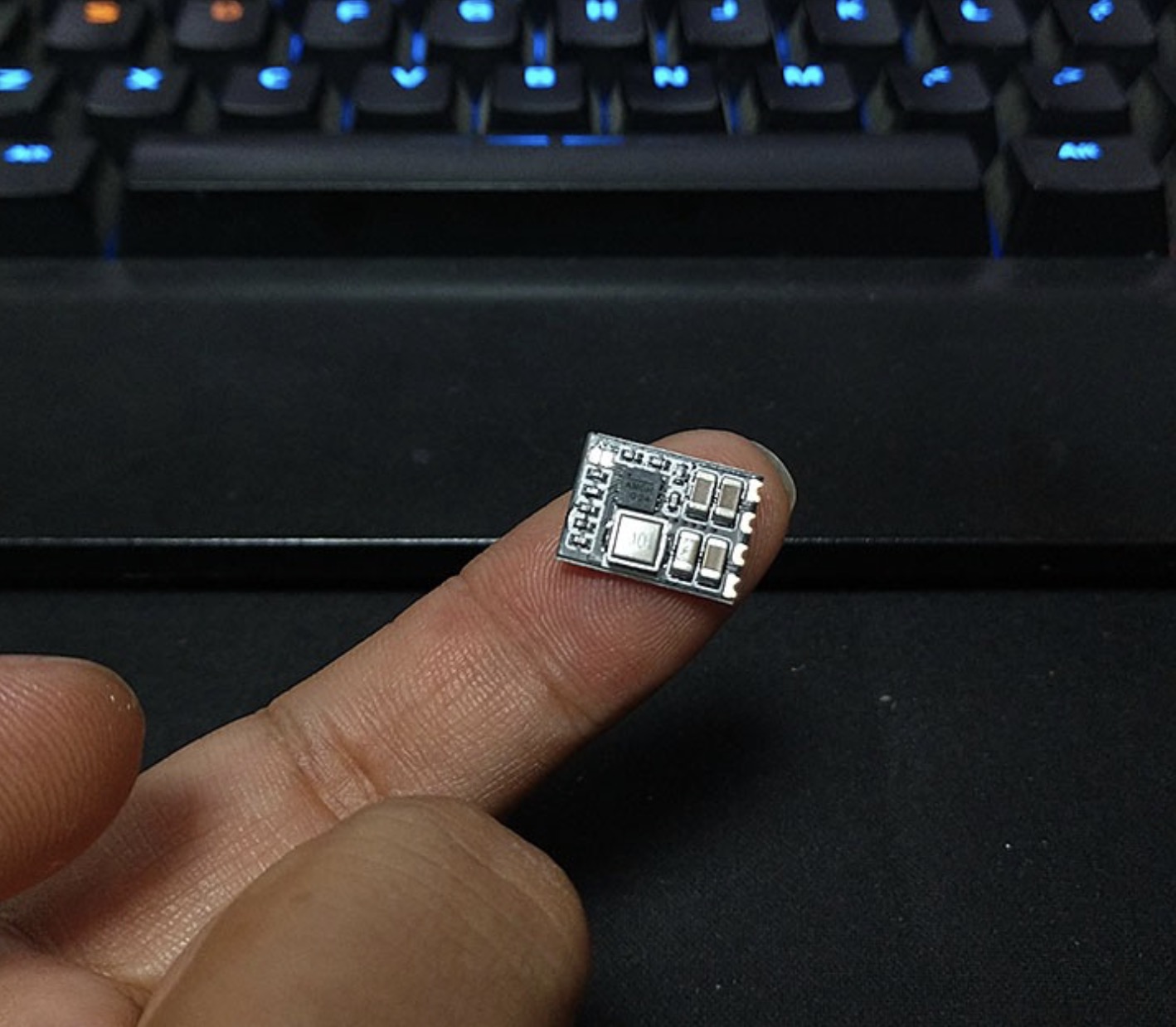
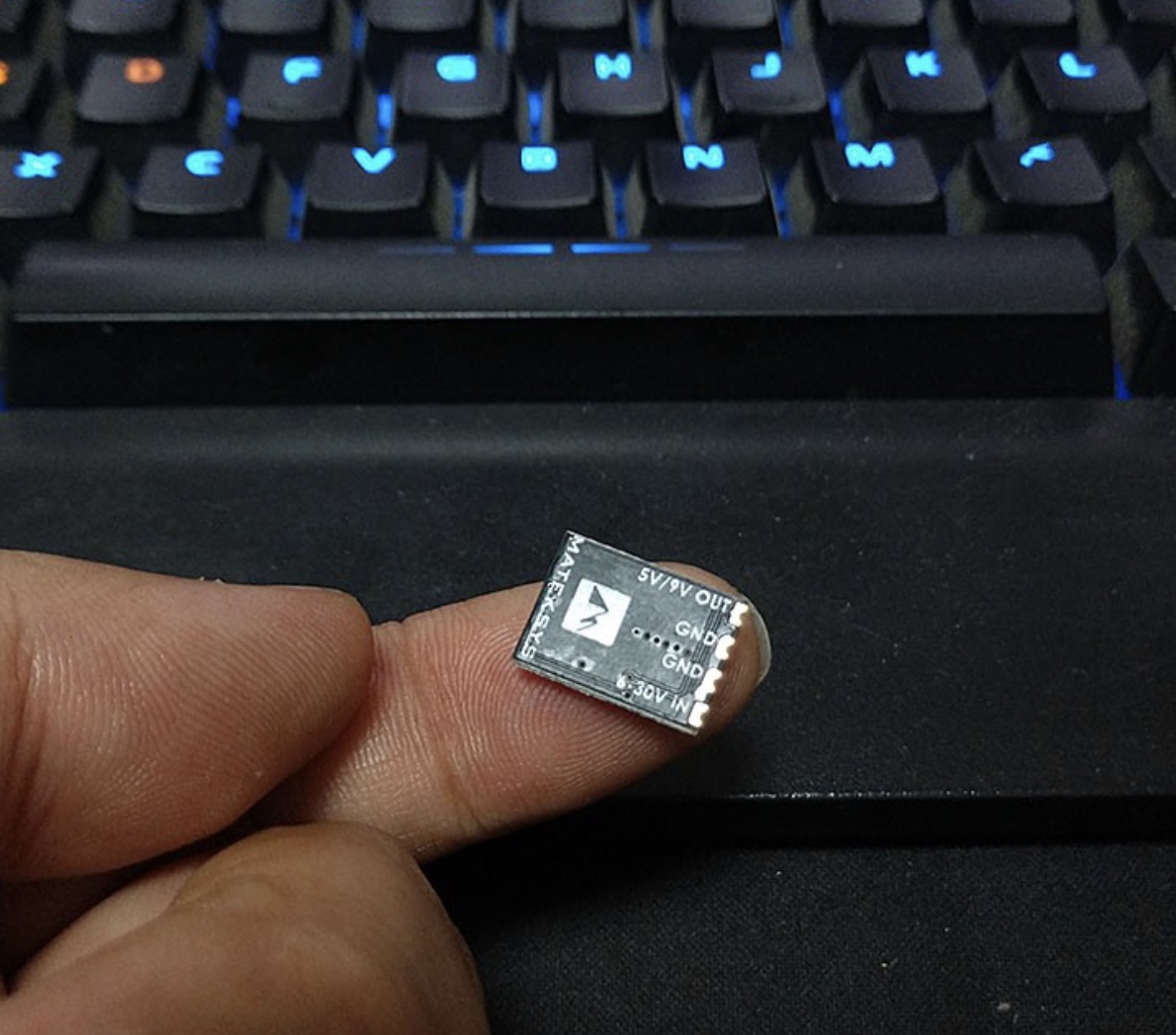
再找体积小Bec,后来找到了Matek的一款超级小巧的Bec,2-6s输入,5/9V输出,1.5A持续,峰值3A,TF卡那么大,这个应该可以了吧?

没想到的事又发生了,拿到了Matek的bec,焊接好了,解锁之后,不再导致电调或飞控重启了,但是推油门后,尾马达不转,在哪里一喘一喘的,用表一量,只有几十mV。然后,再用排除法,换回1s直供,就好使,看来这Bec还带不动有刷电调,怎么办?
灵机一动,把两个Matek的Bec并联起来用…………
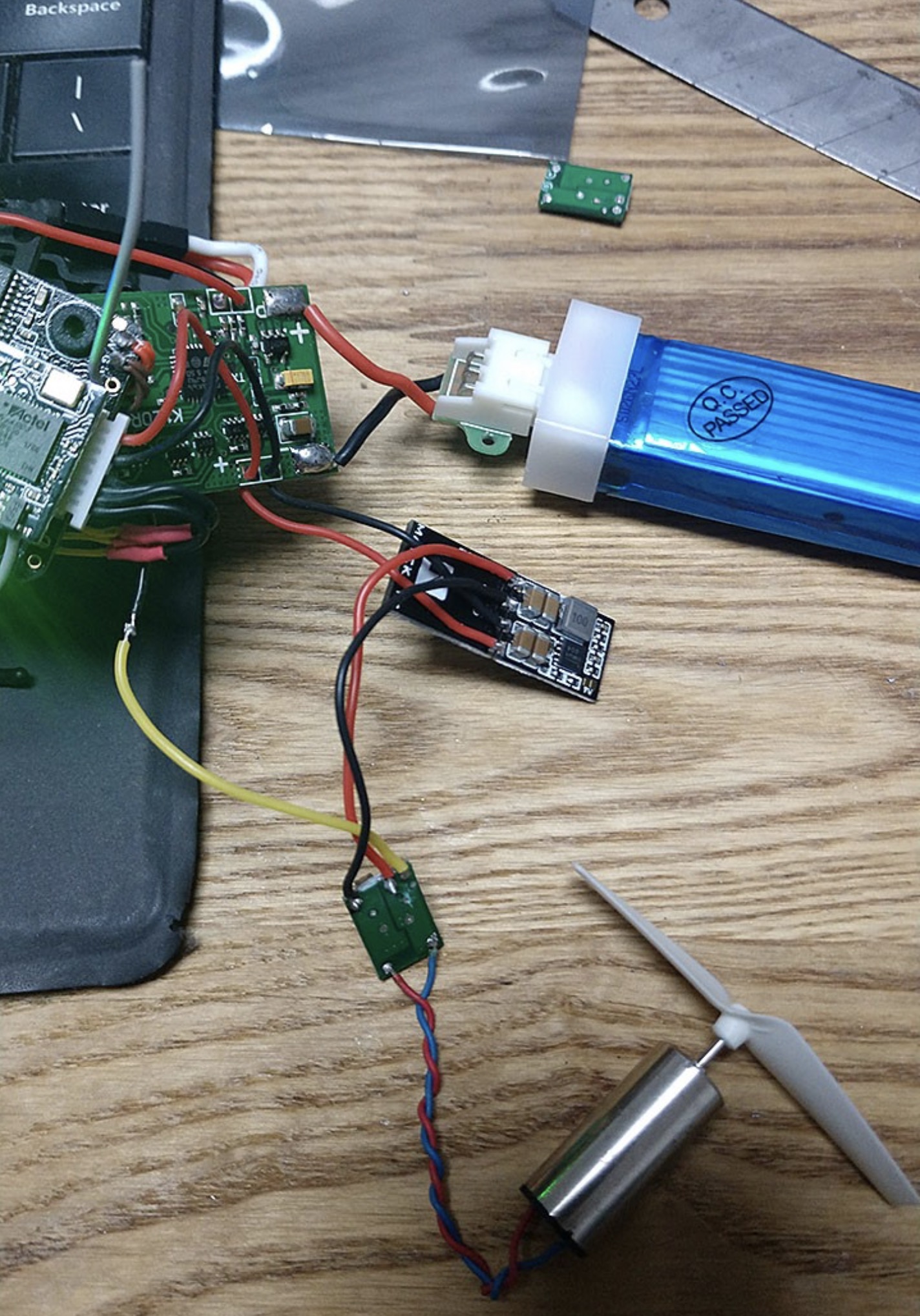
这回可以了。过后咨询Matek,这样并联,也得不到3A的持续供电,建议价格220uf的电容,我临时找不到,就先这样先进行下一步测试版。
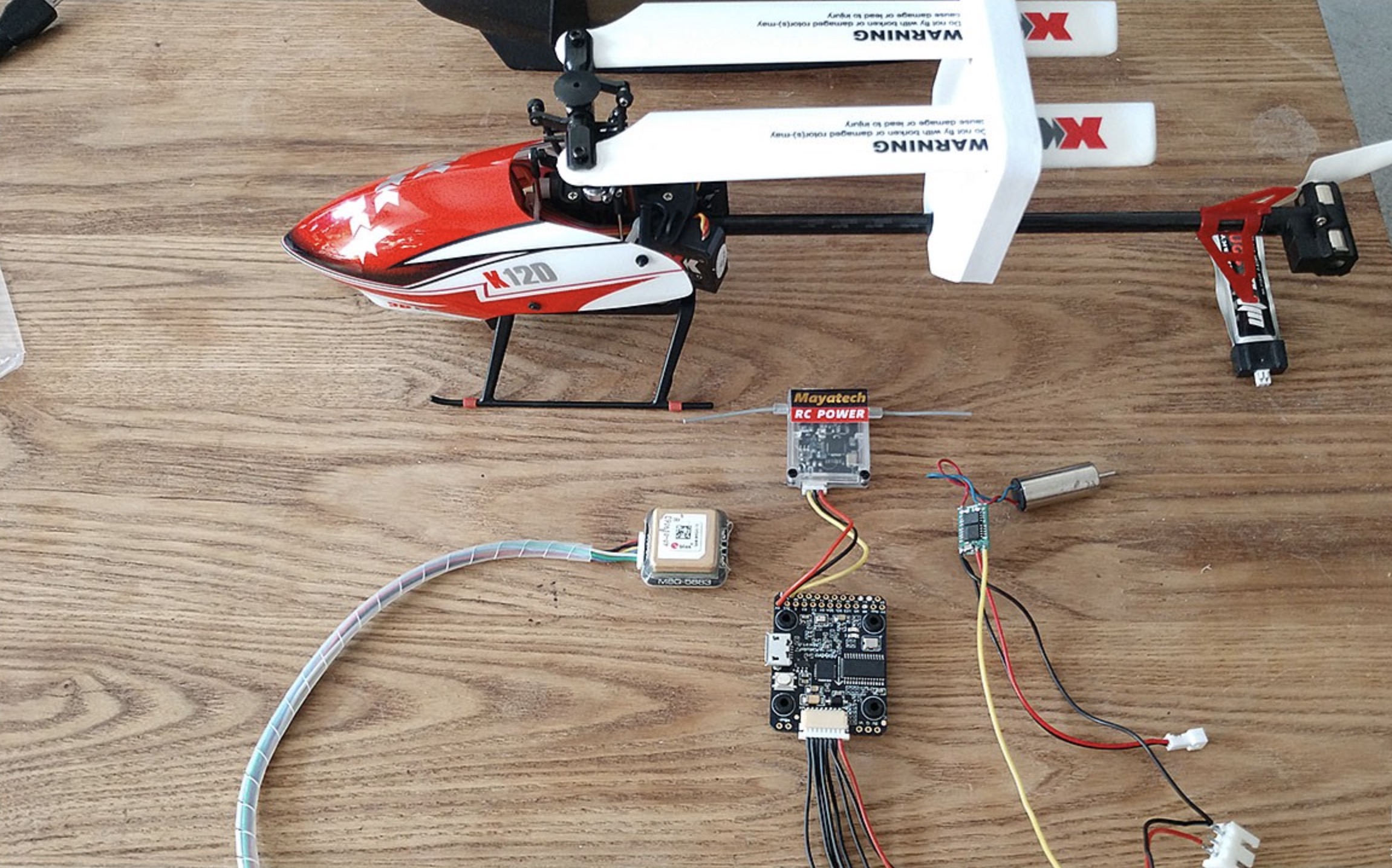
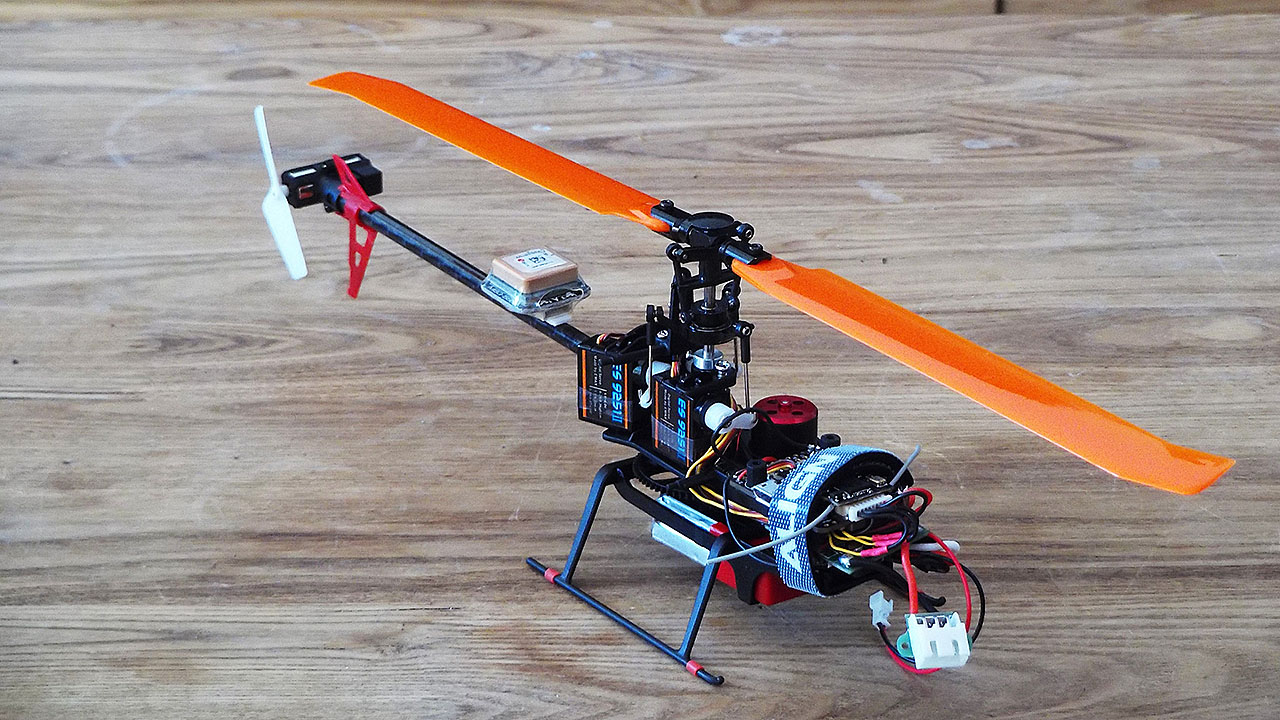
终于可以驱动前后马达了,下一步把GPS装上,能找到的最小的带罗盘的GPS,Matek的M8q和5883罗盘,比BN220还小,但天线有点厚,这个模块的重量有点严重超标了,太重,但也没办了!
这里还是要非常感谢Matek,提供了很多有效的技术信息和适配的部件。

焊接GPS和罗盘,上线窗台搜星测试,一切正常,就是校准罗盘比较麻烦,得抱着电脑一起转圈,我转了几十圈才通过。意外的是,仅仅不到10cm的距离,罗盘没有受到尾空心和斜盘舵机的干扰。
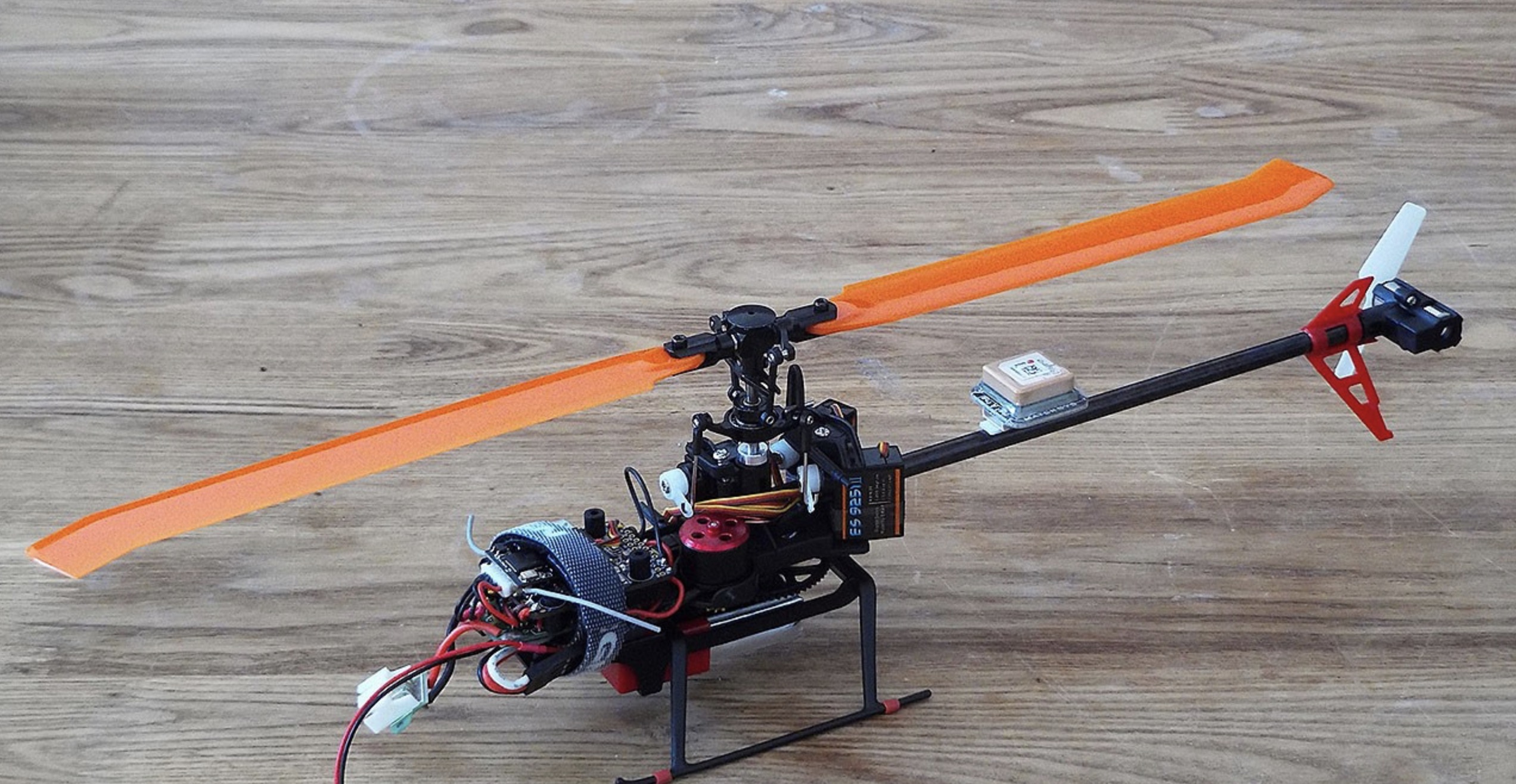
副厂550mAH电池,总起飞重量正好100g

不注意,已经是凌晨2点了,因为在设置DDFP时,遇到了问题,怎么设置都不锁尾,反复修改参数,查找资料,折腾了好久,后来,终于弄对路了,赶紧睡觉,明早试飞吧!
其实已经是首飞完成后,休息了一会,整理资料才开始的,所以,已经是成功的了。